
Publications
For the most complete list, please view Google Scholar.
* denotes equal contribution.
The Surprising Effectiveness of Linear Models for Whole-Body Model-Predictive Control
Arun Bishop, Juan Alvarez-Padilla, Sam Schoedel, Ibrahima Sory Sow, Juee Chandrachud, Sheitej Sharma, Will Kraus, Beomyeong Park, Robert J. Griffin, John M. Dolan, and Zachary Manchester
Humanoids 2025 | arxiv | website
When do locomotion controllers require reasoning about nonlinearities? In this work, we show that a whole-body model-predictive controller using a simple linear time-invariant approximation of the whole-body dynamics is able to execute basic locomotion tasks on complex legged robots. The formulation requires no online nonlinear dynamics evaluations or matrix inversions. We demonstrate walking, disturbance rejection, and even navigation to a goal position without a separate footstep planner on a quadrupedal robot. In addition, we demonstrate dynamic walking on a hydraulic humanoid, a robot with significant limb inertia, complex actuator dynamics, and large sim-to-real gap.
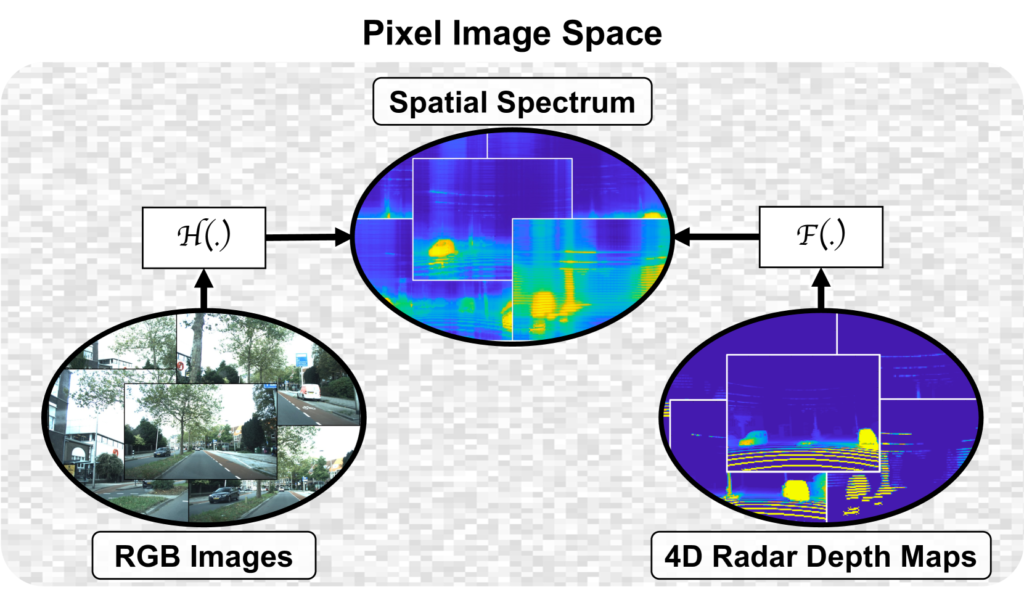
Toward a Low-Cost Perception System in Autonomous Vehicles: A Spectrum Learning Approach
Mohammed Alsakabi, Aidan Erickson, John M. Dolan, Ozan K. Tonguz
ITSC 2025 | arxiv
We present a cost-effective new approach for generating denser depth maps for Autonomous Driving (AD) and Autonomous Vehicles (AVs) by integrating the images obtained from deep neural network (DNN) 4D radar detectors with conventional camera RGB images.
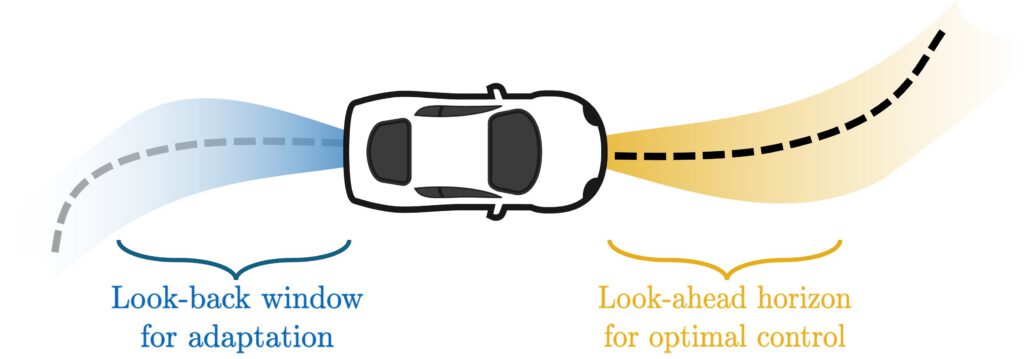
LLA-MPC: Fast Adaptive Control for Autonomous Racing
Maitham F. AL-Sunni, Hassan Almubarak, Katherine Horng, John M. Dolan
IROS 2025 | arxiv | website and code
We present Look-Back and Look-Ahead Adaptive Model Predictive Control (LLA-MPC), a real-time adaptive control framework for autonomous racing that addresses the challenge of rapidly changing tire-surface interactions. Unlike existing approaches requiring substantial data collection or offline training, LLA-MPC employs a model bank for immediate adaptation without a learning period.
Disturbance Observer-based Control Barrier Functions with Residual Model Learning for Safe Reinforcement Learning
Dvij Kalaria, Qin Lin, John M. Dolan
IROS 2025 | arxiv | website | code
RES-DOB-CBF: Proposes using Residual model learning (RES) and Disturbance Observer (DOB) based Control Barrier Function (CBF) to filter unsafe actions enabling deploying safe Reinforcement Learning (RL) on real systems that does not interfere much with learning and is robust to sensor noises and model errors
Real-Time Whole-Body Control of Legged Robots with Model-Predictive Path Integral Control
Juan Alvarez-Padilla, John Z. Zhang, Sofia Kwok, John M. Dolan, Zachary Manchester
ICRA 2025 | arxiv | website | code
Presenting a system for enabling real-time synthesis of whole-body locomotion and manipulation policies for real-world legged robots by leveraging the efficient parallelization capabilities of the MuJoCo simulator to achieve fast sampling over the robot state and action trajectories.

AnyCar to Anywhere: Learning Universal Dynamics Model for Agile and Adaptive Mobility
Wenli Xiao*, Haoru Xue*, Tony Tao, Dvij Kalaria, John Dolan, Guanya Shi
ICRA 2025 | arxiv | website
AnyCar is a generalist vehicle dynamics model for agile mobility. It can adapt to various cars, tasks, and envs via in-context adaptation, outperforming well-tuned generalist models up to 54%.
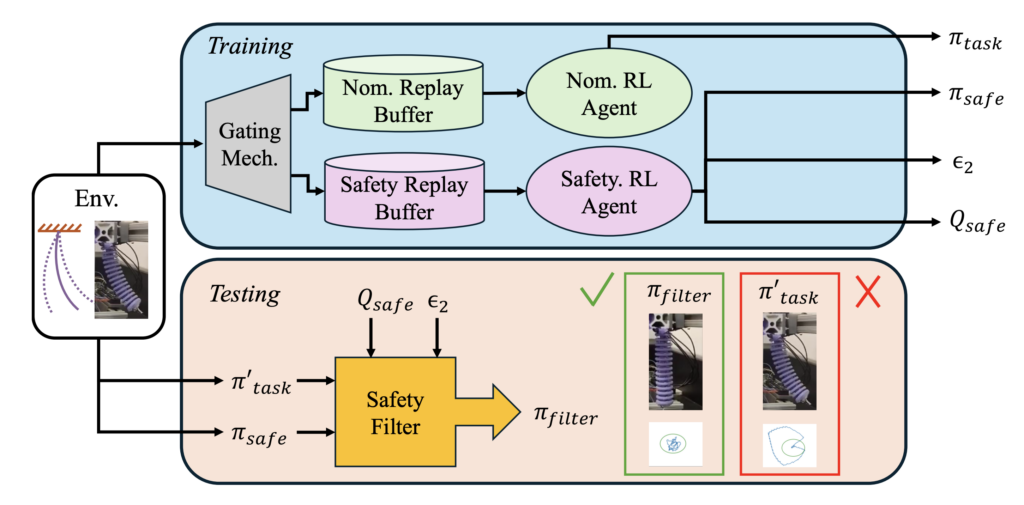
Q-learning-based Model-free Safety Filter for Soft Robotic Applications
Guo Ning Sue*, Yogita Choudhary*, Richard Desatnik, Carmel Majidi, John Dolan, Guanya Shi
ICRA 2025 | arxiv
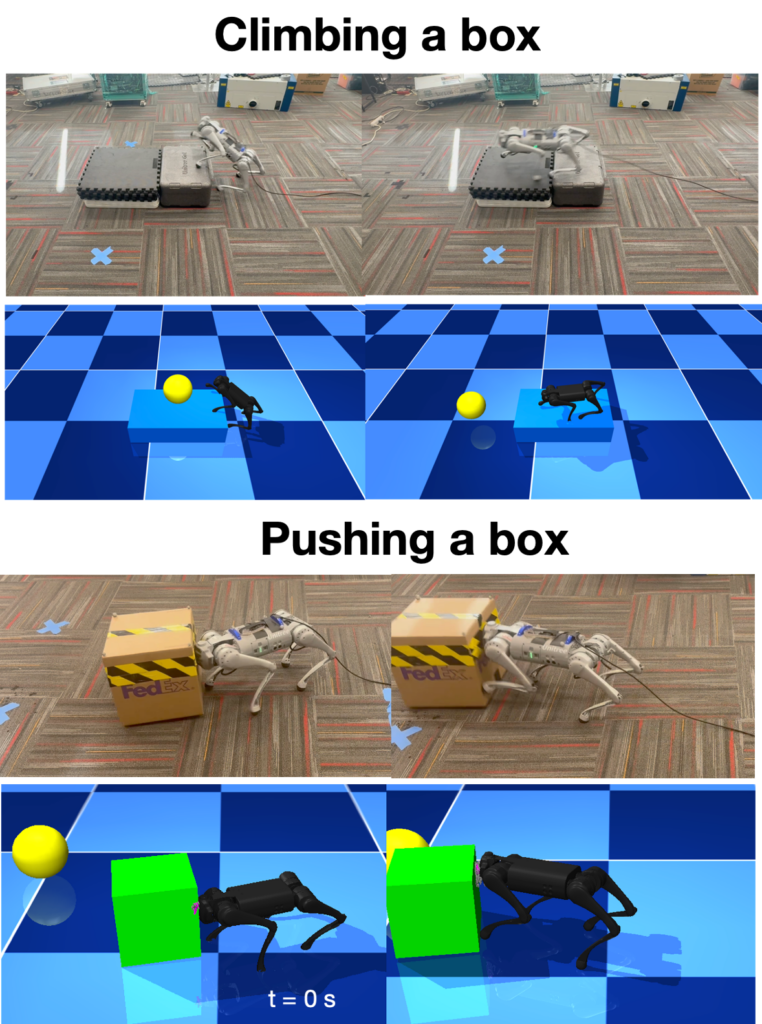
Safe Control of Quadruped in Varying Dynamics via Safety Index Adaptation
Kai S. Yun, Rui Chen, Chase Dunaway, John M. Dolan, Changliu Liu
ICRA 2025 | arxiv | website
We deploy Safety Index Adaptation (SIA) for a quadruped robot to safely navigate in varying dynamics. SIA enables real-time adaptation of safety indices to ensure provable safety. With SIA, the quadruped carries packages of varying weights and sizes while navigating through obstacles without failure. Moreover, we introduce a novel linear model for varying quadruped dynamics and a method to identify the changing dynamics.
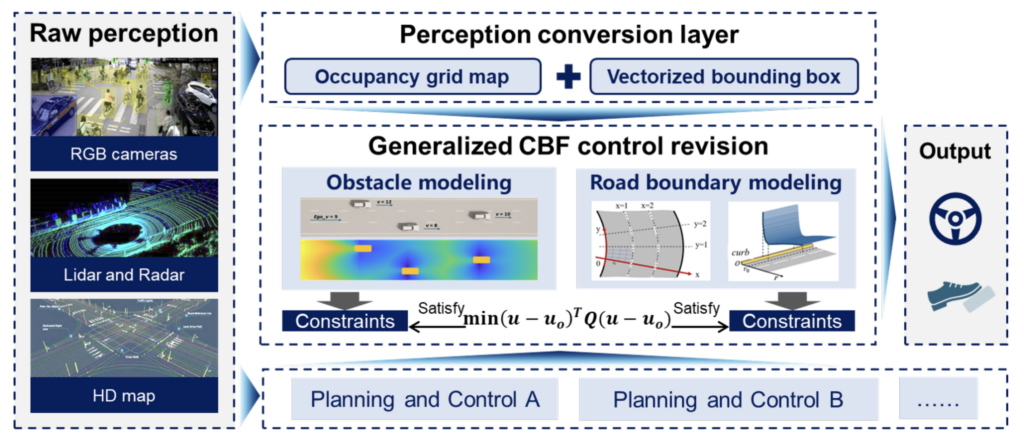
A Generalized Control Revision Method for Autonomous Driving Safety
Zehang Zhu*, Yuning Wang*, Tianqi Ke, Zeyu Han, Shaobing Xu, Qing Xu, John M Dolan, Jianqiang Wang
ICRA 2025 | arxiv
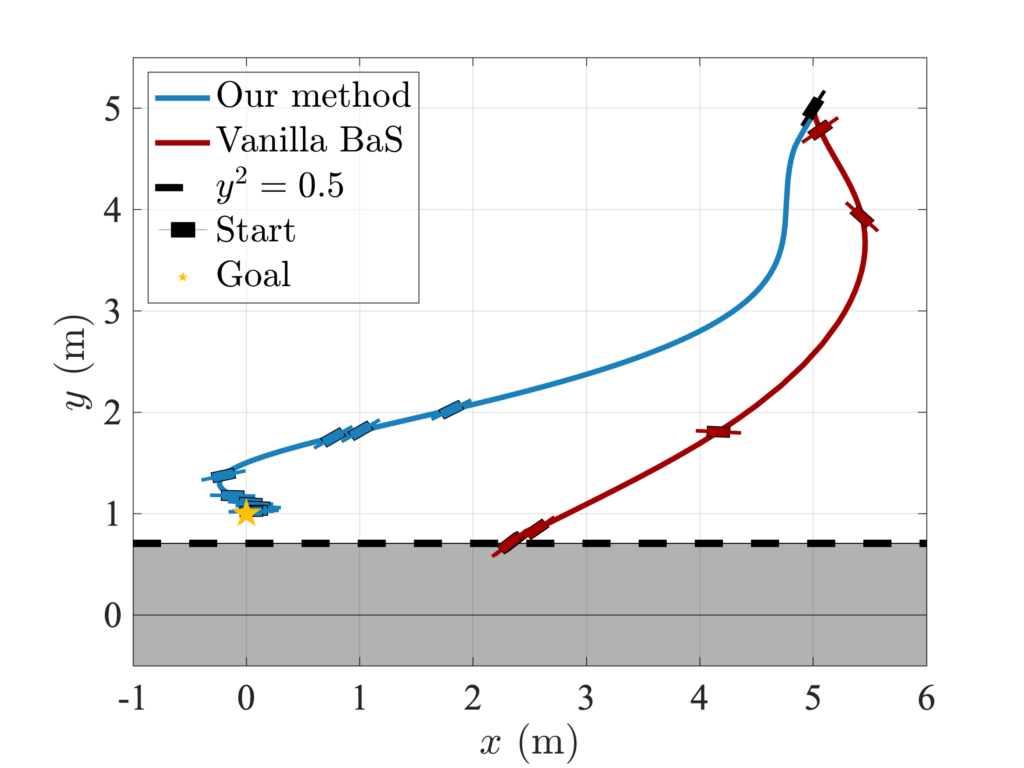
Safety Embedded Adaptive Control Using Barrier States
Maitham F. AL-Sunni, Hassan Almubarak, John M. Dolan
American Control Conference (ACC) 2025 | arxiv
We introduce Safety Embedded Adaptive Control, which leverages barrier states to embed safety constraints directly into the dynamics under parametric uncertainty. Our method balances safety and performance, ensuring robust stability and forward invariance of safety sets—demonstrated on an inverted pendulum, adaptive cruise control, and a planar quadrotor with unknown drag.
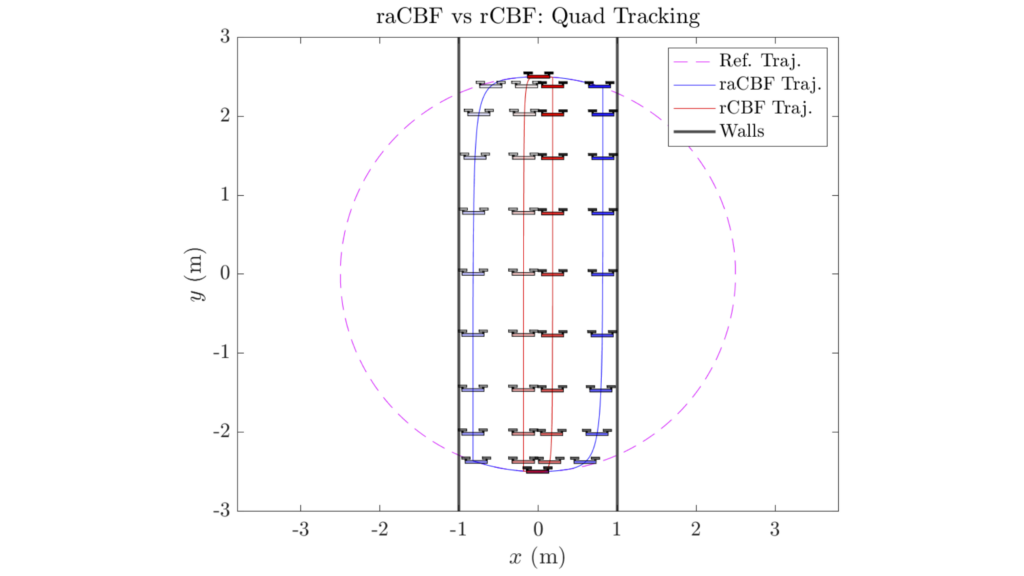
Synthesis and Verification of Robust-Adaptive Safe Controllers
Simin Liu*, Kai S. Yun*, John M. Dolan, Changliu Liu
European Control Conference (ECC) 2024 | arxiv
We investigate controller synthesis for dynamical systems with uncertain parameters. We designed an optimization algorithm for generating robust-adaptive safe controllers that can guarantee safety in the presence of uncertainties, without being overly conservative. Our controller performs 55% better compared to popular robust controllers.

Learning Model Predictive Control with Error Dynamics Regression for Autonomous Racing
Haoru Xue, Edward L. Zhu, John M. Dolan, Francesco Borrelli
ICRA 2024 | arxiv | website | code | social media | talk
Use MPC + robot learning to explore optimal policy and dynamics model online safely in Sim2Real. Learn the handling limit of extreme driving like a professional race car driver. Deployed on a full-size race car!
Safe Deep Policy Adaptation
Wenli Xiao*, Tairan He*, John M. Dolan, Guanya Shi
ICRA 2024 | arxiv | website | code | social media | talk
This paper jointly tackles policy adaptation and safe reinforcement learning with safety guarantees. Comprehensive experiments on (1) classic control problems (Inverted Pendulum), (2) simulation benchmarks (Safety Gym), and (3) a real-world agile robotics platform (RC Car) demonstrate great superiority of SafeDPA in both safety and task performance, over state-of-the-art baselines.
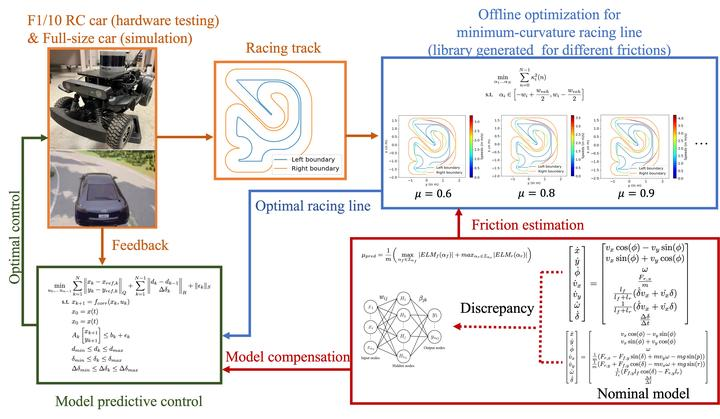
Adaptive Planning and Control with Time-Varying Tire Models for Autonomous Racing Using Extreme Learning Machine
Dvij Kalaria, Qin Lin, John M. Dolan
ICRA 2024 | arxiv | website | code | social media
A semi-learning based approach that learns a residual dynamics model that can quickly adapt to changes in environment for autonomous racing like tire degradation, weather change etc.

WROOM: An Autonomous Driving Approach for Off-Road Navigation
Dvij Kalaria, Shreya Sharma, Sarthak Bhagat, Haoru Xue, John M. Dolan
ICRA 2024 Workshop | arxiv | website | code
WROOM brings a gym environment for training off-road driving RL policy. We use PPO + CBF to train an end-to-end agent to safely navigate in the real world.
Safe Control Under Input Limits with Neural Control Barrier Functions
Simin Liu, Changliu Liu, John M. Dolan
CoRL 2023 | arxiv | code | slides
We created a scalable dynamics adaptation technique using adversarial training of neural CBFs. Essentially, our method trades the theoretical guarantees of safety for scalability and strong empirical guarantees (>99% safe). Currently, this class of methods has been shown to scale to >20D. This includes complex systems, like balancing quadrotors and many-linked manipulators.

Towards Safety Assured End-to-End Vision-Based Control for Autonomous Racing
Dvij Kalaria, Qin Lin, John M. Dolan
IFAC World Congress 2023 | arxiv | code | social media
A model-based CBF safety wrapper on model-free automated imitation learning makes it very sample efficient.